人工智慧系列 AI HUB專欄系列
AI實作系列 OpenVINO系列
系統開源系列 系統安裝系列
實境互動(XR)系列 採收(採果)機器人系列
tinyML(MCU AI)系列
tinyML(MCU AI)系列
 |
 |
 |
 |
AI HUB專欄系列
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
【回到頁首】
人工智慧(AI)系列
 |
| AI萬能?導入AI的八大迷思剖析 |
 |
| 從AIGO業界出題看如何成功導入AI |
 |
| 從AIGO業界出題內容看台灣AI如何落地 |
 |
| 深度學習,從「框架」開始學起 |
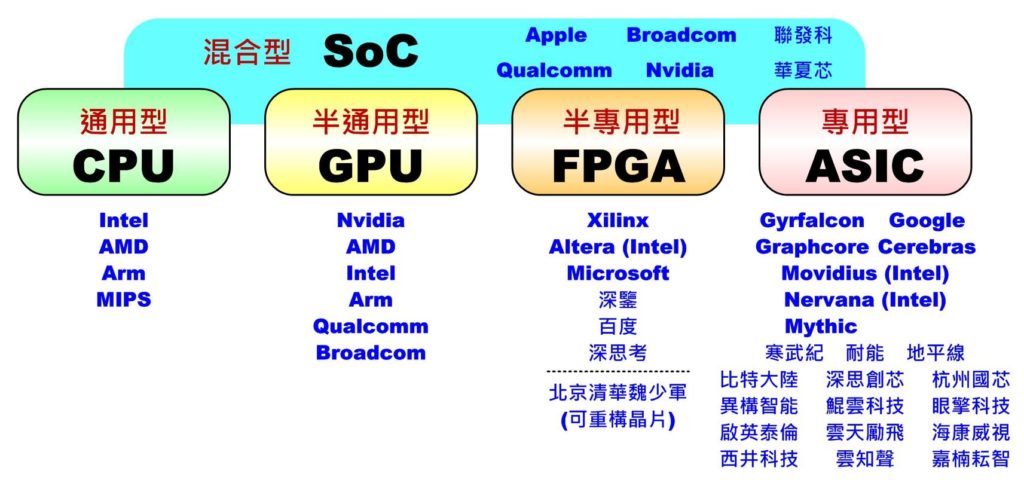 |
| 人工智慧AI晶片與Maker創意接軌 |
 |
| 當AI遇上MAKER會迸出什麼火花? |
【回到頁首】
OpenVINO系列
 |
| 2021年OpenVINO教學系列 |
 |
| 【課程簡報】Intel人工智慧運算 #1─快速掌握機器手臂視覺辨識技術 |
 |
| 【OpenVINO™+RealSense™教學】土炮智能機器手臂之視覺系統 |
 |
| OpenVINO與OpenCV搭配─幹電腦視覺的活一點都不累 |
 |
| 【Edge AI意應用自造松】OpenVINO預訓練模型使用及應用實例開發 |
 |
| 【Edge AI意應用自造松】OpenVINO平台運用要領 |
 |
| 【OpenVINO™教學】土炮體感控制系統 |
 |
| 【OpenVINO™教學】土炮影像實例分割型智慧監控系統 |
 |
| 運用Intel OpenVINO土炮自駕車視覺系統 |
 |
| Computex 2019 INTEL在邊緣計算推廣火力全開 |
【回到頁首】
AI實作系列
 |
如何以YOLOv3訓練自己的資料集─以小蕃茄為例 |
 |
| 使用Colaboratory免費資源學AI,正是時候! |
【回到頁首】
實境互動(XR)系列
 |
| XR新視界─實境互動應用與發展趨勢 |
 |
| 【RealSense DevMeetup】3D感測可行技術與開發工具剖析 |
 |
| Computex 2019 3D感測即將成為下一世代實境互動新利器 |
 |
| Magic Leap One 深度剖析 |
 |
| 超黑科技_光場攝影及顯示技術發展趨勢 |
 |
| 實境互動新技術 |
【回到頁首】
系統開源系列
 |
| OpenQSignage開源迷你電子看板 |
 |
| OpenQCam_ePTZ開源迷你相機安全監控應用 |
 |
| OpenQCam_ePTZ開源迷你相機 |
 |
| OpenQPano 開源360度顯示器 |
 |
| 2019開源人大會—OpenQPano |
【回到頁首】
系統安裝系列
 |
| 【3D感測器】Intel RealSense™ SDK無痛安裝指引 |
 |
| 如何讓Nvidia Jetson Nano能順利執行OpenCV4.1.0中CUDA相關函式 |
 |
| 樹莓派(Pi 3+)安裝OpenCV 4 / QT5填坑心得 |
 |
| 如何移植Movidius神經計算棒到Pi Zero W |
【回到頁首】
採收(採果)機器人系列
 |
| FBTUG FramHarvestBot專案設計解析_活動簡報 |
 |
| 採收機器人_視覺篇 |
 |
| 採收機器人_夾爪篇 |
 |
| 採收機器人_機器手臂篇 |


沒有留言:
張貼留言